paper-reading-group
MOPO: Model-based Offline Policy Optimization
Tianhe Yu, Garrett Thomas, Lantao Yu, Stefano Ermon, James Zou, Sergey Levine, Chelsea Finn, Tengyu Ma
https://arxiv.org/pdf/2005.13239.pdf
Problem:
- Offline RL: Regular RL methods need to improve with interaction. Not suitable for: generalization, safety, sample inefficient.
- Off-policy algorithms:
- Model-free methods: Overestimation of Q function for out-of-distribution actions, Cannot generalise out of data’s states and actions.
- Model-based methods: More supervised (since s,a rather than r), supervised training rather than RL, better uncertainty estimation techniques than value-based RL. But here model cannot be improved with experience, so need to be careful on what model learns.
Solution:
- Model where reward is penalized by model error (to account for model uncertainty). This is the MDP
- Train policy on this MDP using MBPO
Details:
- Use model based because of earlier specified reasons and that MBPO performs better than SAC off the shelf on D4RL
- MBPO
- Learns transition and reward distribution (this is the model) from data
- During training, use transition model to generate rollouts and save in replay buffer
- Update policy using both model data and given data. (Like Behavioral Cloning, World models)
- In online setting: Additionally use both model and environment to improve model and policy (Like Dyna)
- MOPO
- Return: Should be able to generalize to OOD data. But Risk: model will become unreliable for OOD data and might overfit to unreliable model data. Need to balance these
- Quantifying uncertainty: from dynamics to return
- How does error in transition model affect error in return?
- Note: Estimate true model using learned model. Estimate true return using return from model.
- Lemma 1: Return depends on G (difference in values from both transition models). A model that gets high reward and minimizes G will maximize return on real model too. If we can get G, can use as upper bound for return.
- Since V is unknown, replace with terms depending only on transition model. Options depend on assumptions we take.
- If assume that reward is bounded can write Eq. 4 (Simpler assumption)
- If assume V’s are Lipschitz functions, can use Wasserstein distance and write Eq 5
- How does error in transition model affect error in return?
- Algorithm 1: With Eq 4. assumption.
- Penalize reward by an amount proportional to model error (T error). From Eq. 2
- Run till convergence: policy = argmax (estimated return).
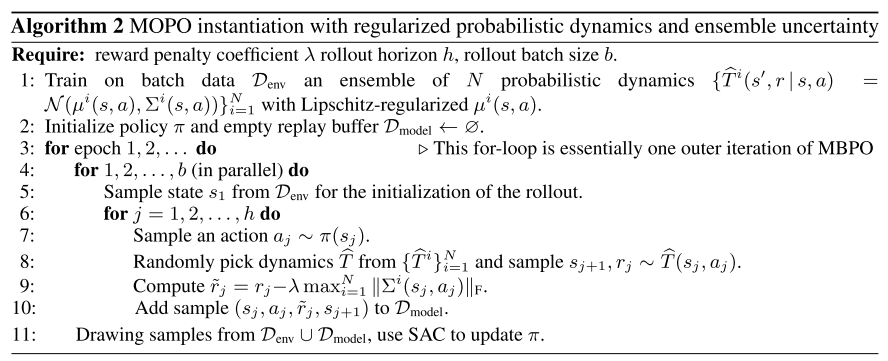
- Algorithm 2: With Eq. 5 assumption
- This is final MOPO since Lipchitz regularization has been seen to improve in and out of distribution generalization.
- Uncertainty is quantified using maximum standard deviation of model prediction from Lipchitz regularized mean.
Results
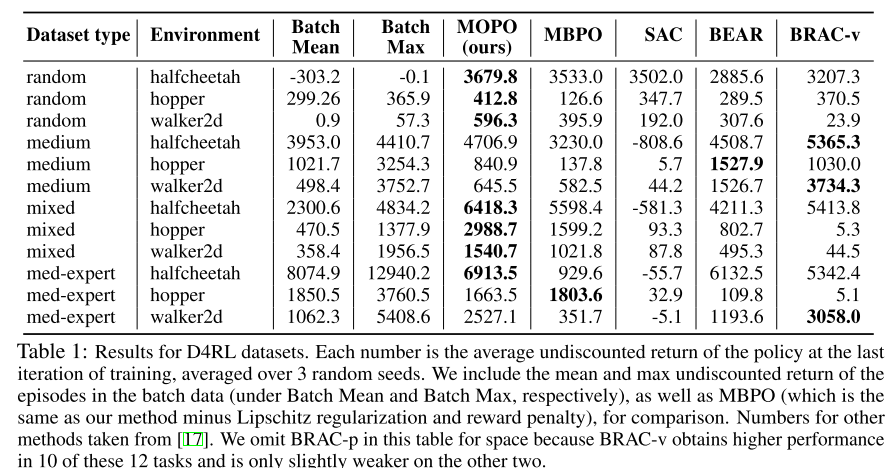
- In distribution, for different dataset categories
- random - random policy
- medium - partial SAC then rollout
- mixed - SAC then take replay buffer as dataset
- medium-expert - combine fully trained policy with rollouts from either partial or random
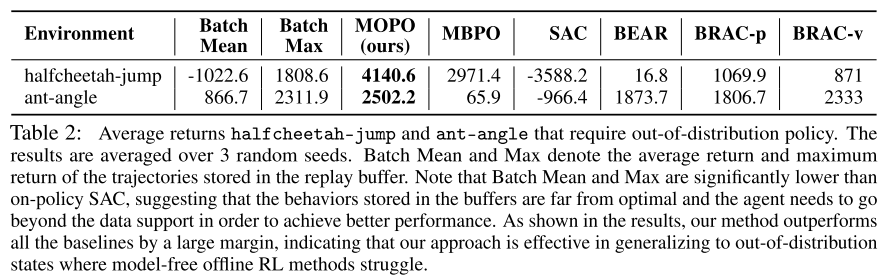
- Out of distribution generalization
- Cheetah-jump - Train on walk, test on jump
- Ant-angle - Train on straight walk, test on 30 degree walk
Future work
- Don’t theoretically understand why model-based perform so much better on offline tasks. Find out why.
- Find how to get model-free offline methods up to the level of model-based.