paper-reading-group
Model Based Reinforcement Learning
Motivation
- Every living being — carries a model of external reality
- Small and Long term simulations based on actions and imagination of next states.
- Benefits?
- More Scenarios
- Safer and more competent
- Simulate expensive/not safe “real” world scenarios with little data.
- Have models of other agents in the world (e.g. in the case of self-driving scenarios)
- AlphaGo
- Search over different possibles of the game. Plan better.
- Used a lot in:
- Self-driving
- Robotics and Control
- Game play (alphago)
- Operations Research (energy)
And many more
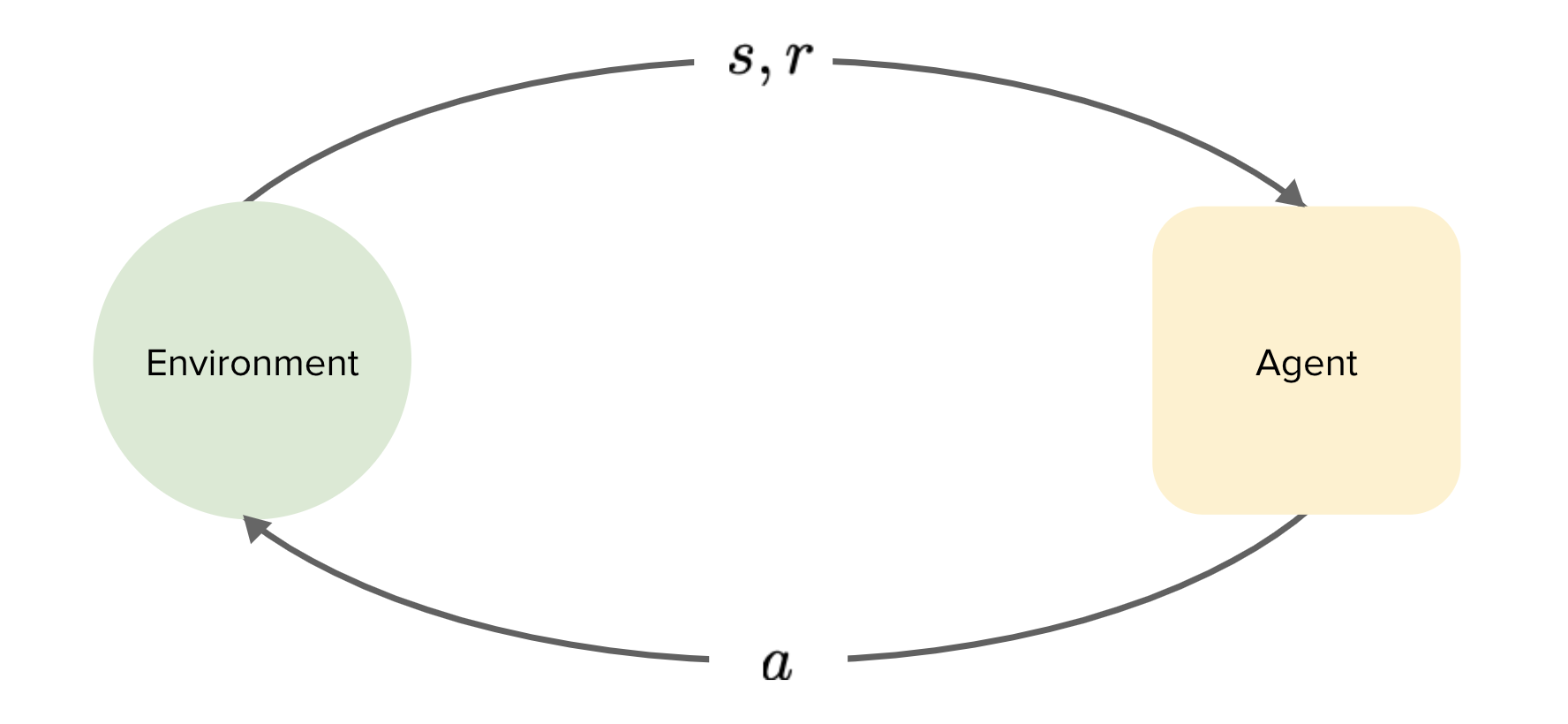
Problem Statement
Markov Decision Process
Model-free vs Model-based RL
First:
- Collect data: $D \rightarrow {s_{t}, a_{t}, r_{t}, s_{t+1}}$
Model-free:
- Learn policy directly form data.
$D \rightarrow \pi$
Model-based
- Learn Model of the world
- Use this model to improve or learn a policy
$D \rightarrow f \rightarrow \pi$
What is the model?
Model is a representation that explicitly encodes knowledge about the structure of the environment and task.
- Transition/Dynamics Model: $s_{t+1} = f_s(s_t, a_t)$
- A model of the rewards: $r_{t+1} = f_r(s_t, a_t)$
- An inverse transition/dynamics model: $a_t = f_s^{-1}(s_t, s_{t+1})$
- A model of distance
- A model of future rewards.

Where does the model fit?
Transition Models
- State Based
- Observation Based
- Latent State Based
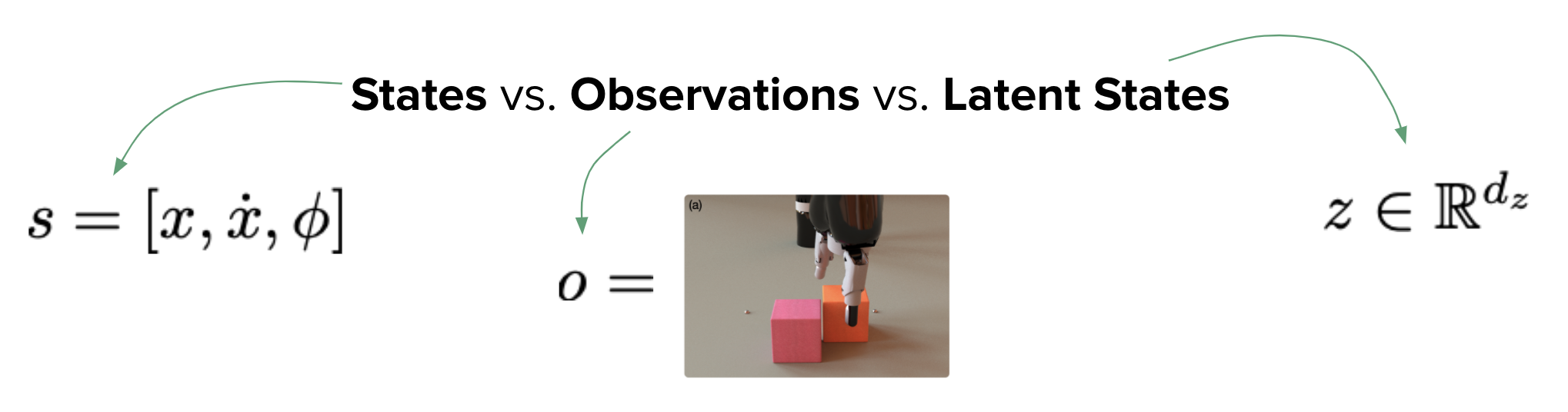
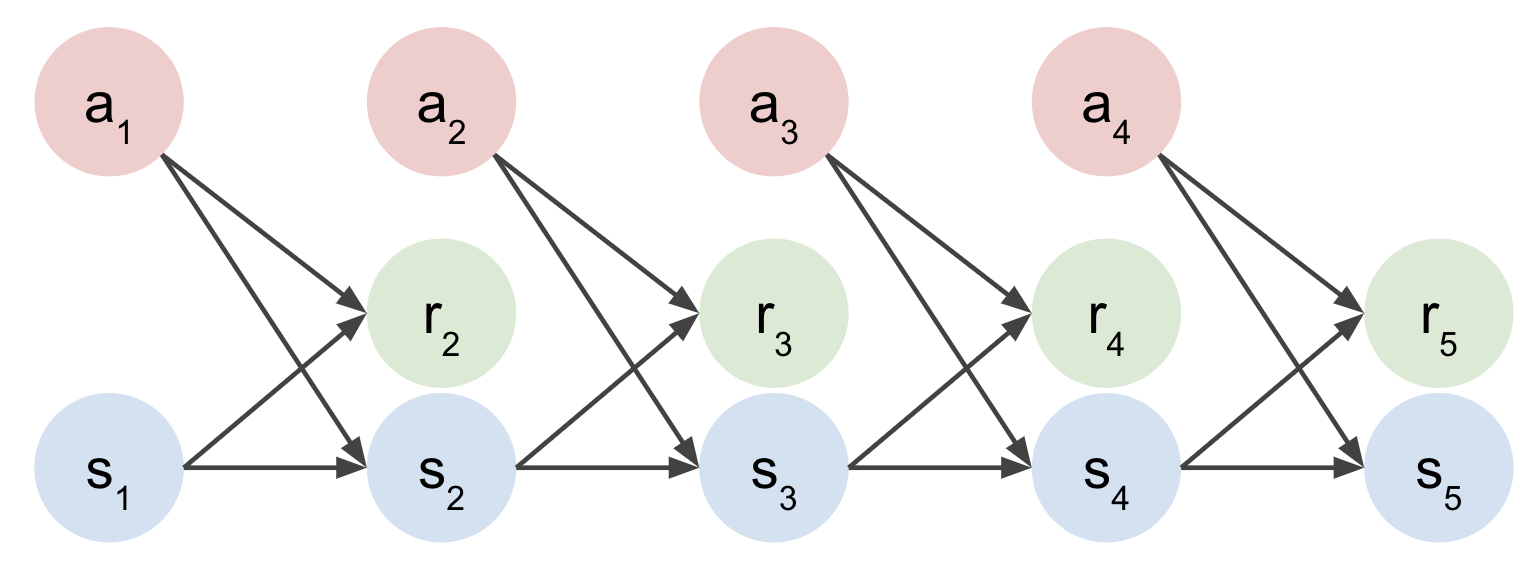
State-based Transition Model
Assumption: MDP is fully observable. All physics (if there is) is also assumed to be known.
- Train directly on states
Other approaches
- Represent state variables as nodes in a GNN - high inductive bias
What if we dont have states but only observations?
e.g. Images
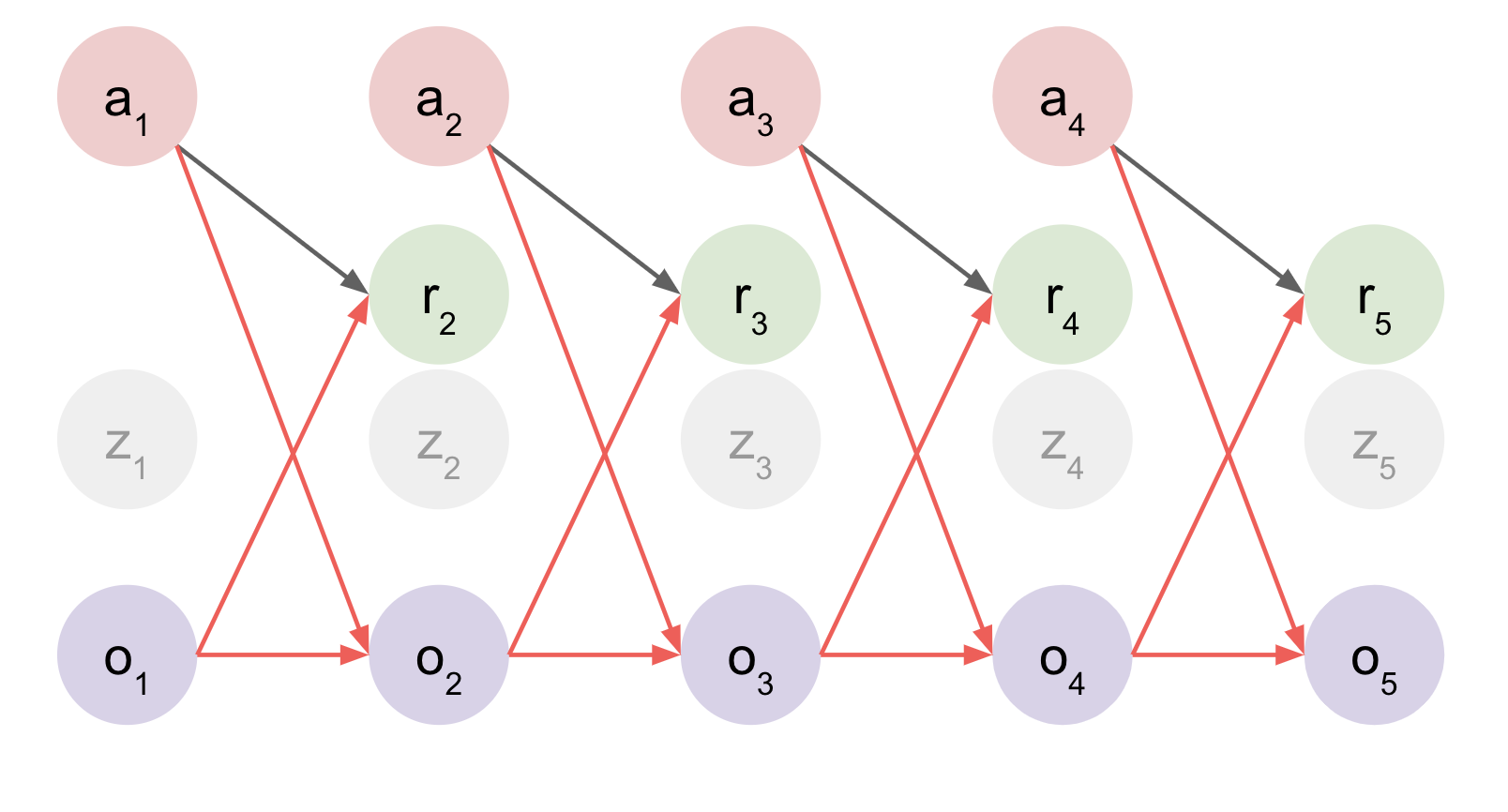
- Observation Transition Model $o_{t+1} = f_o(o_t, a_t)$
- Reconstruct observations at each timestep? (from Latent State)
- Works well![5]
Problems:
- Reconstruction at every timestep is great but VERY expensive.
Latent State Based
- Embed Initial Observation and rollout in a latent space.
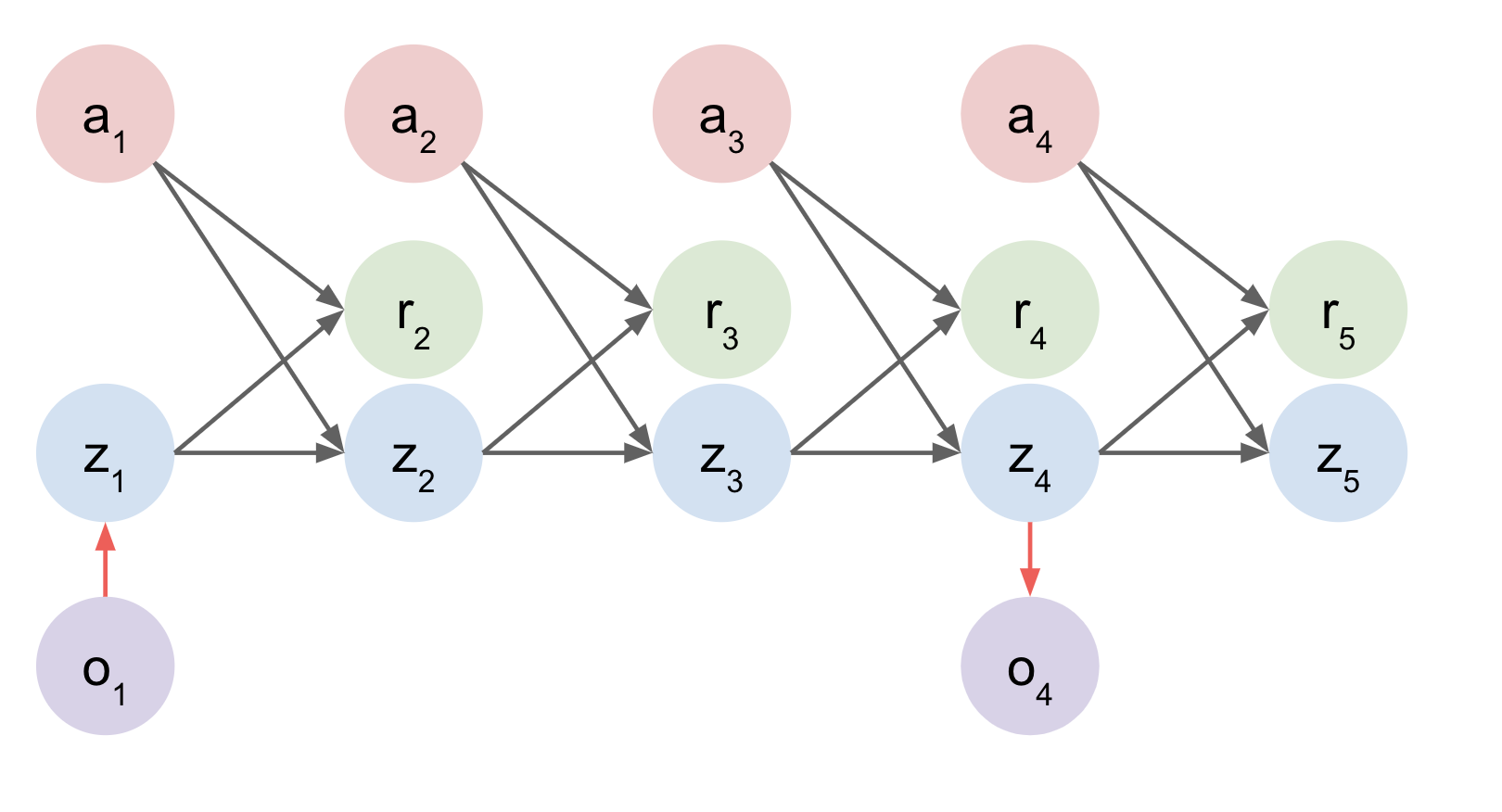
Latent Space Models
Examples:
- World Models (Ha and Schmidhuber)[6]
- PlaNet[7]
- Dreamer[8]
Do you have domain knowledge?
- Structure your deep learning models in an advantageous way.
- E.g. Object Oriented Learning[9]
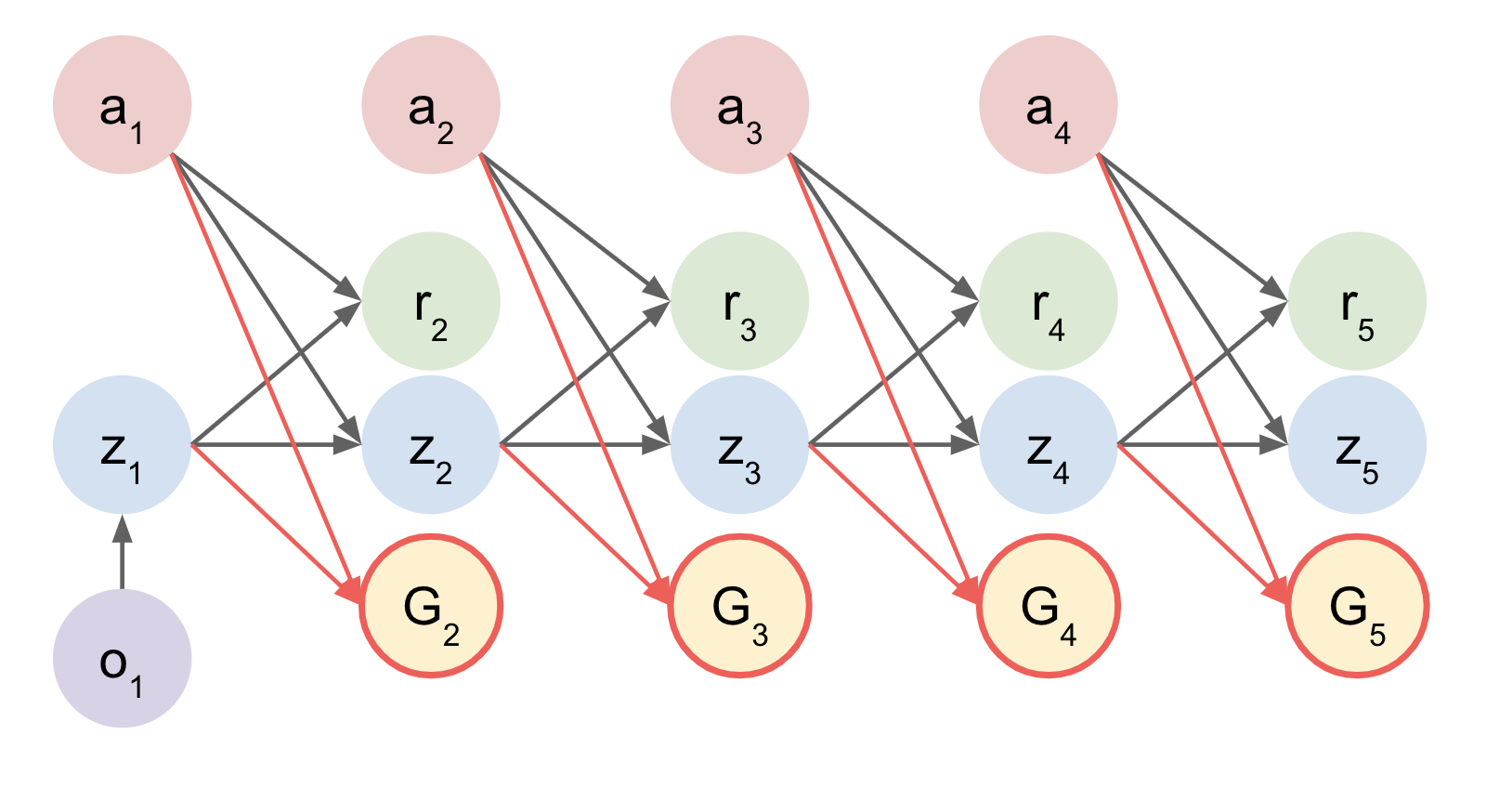
Recurrent Value Models
- Predicting Value Function at each timestep.
- Essentially imagine expected return.
Imagined Value Function
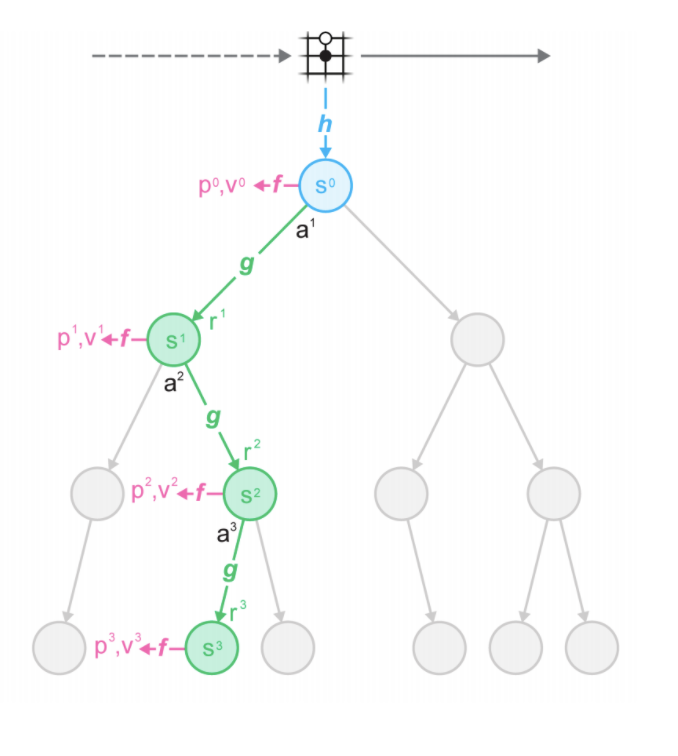
MCTS based search over states. To select best action at each timestep.
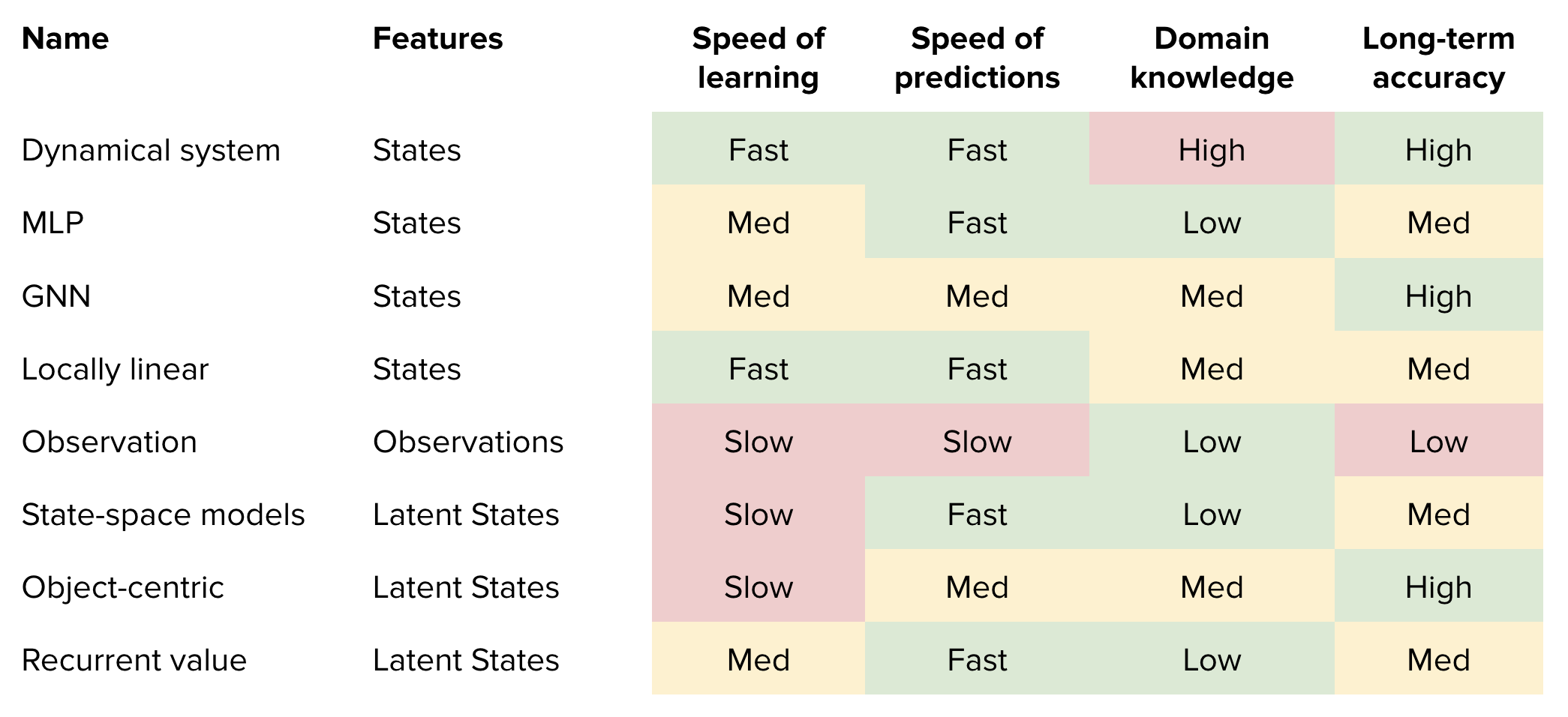
Tradeoffs of representing states.
Non-parametrics methods
- Represent transitions using graphs?
- Works well! Memory Constraints!
- Simply use replay buffers?
- Works well! Memory Constraints!
- Symbolic Descriptions of “plans” using PDDL[10]
- Accurate plans but not scalable.
- Use Gaussian Processes to represent transitions
- Really good at uncertaininty estimation (rare events for e.g. when caring about safety)
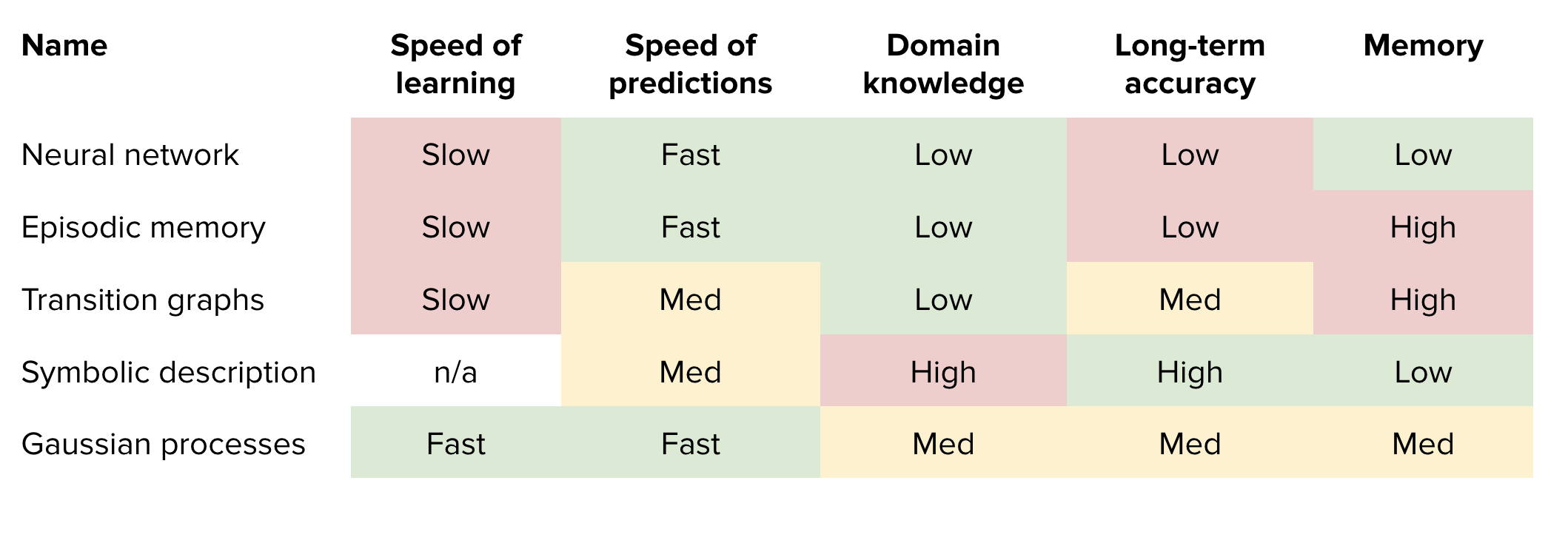
Tradeoffs for ways to model transitions.
What after having a model?
- Revisiting original landscape
Where does the model fit?
Simulate the Environment
- Mix Model-generated experience with real data.
- Similar to data augmentation of the whole environment
- Dyna-Q (Sutton): One of the seminal papers.
- Idea is to simulate next transitions at current state for the 1 timestep only.
- MBPO:
- Extension to n-timesteps.
- Advantage: Better exploration (as more possible trajectories are covered), especially helpful in robotics since data collection is expensive and costly (in terms of safety)
Assisting Policy Learning
Why?
- End to end training of model + planning + execution.
Whats wrong with traditional gradient application?
E.g. Reinforce
- High Variance! Means model gradients are very noisy, making training worse and worse
What do we do?
- Replace transition functions of env with model
Revisiting Policy Gradient:
\[J(\theta) = \sum\gamma^tr_t\]Recall reward definition of model:
\[r_t = f_r(s_t, a_t)\]Plugging in and using chain rule:
\[J(\theta) = \sum\gamma^t( \nabla_sf_r(s_t, a_t)\nabla_\theta s_t + \nabla_af_r(s_t, a_t)\nabla_\theta a_t)\]- BPTT!
Here again, gradient of states wrt model parameters can be replaced from the state transition functions. Should be easy to extend :)
Characteristics[1]:
- Deterministic (No variance) ✅
- Long-term credit assignment ✅
- Prone to local minima ❌
- Poor conditioning (Vanishing/Exploding Gradients) ❌
Strengthening the Policy
Refer 1.
References
- ICML Tutorial on Model-based RL: https://sites.google.com/view/mbrl-tutorial
- Model Predictive Control: http://papers.nips.cc/paper/8050-differentiable-mpc-for-end-to-end-planning-and-control.pdf
- Cross Entropy Method for Action Selection in Model Based RL : https://arxiv.org/pdf/1909.12830.pdf
- AlphaGo: https://www.nature.com/articles/nature16961
- Visual foresight: Model-based deep reinforcement learning for vision-based robotic control.: https://arxiv.org/pdf/1812.00568.pdf
- World Models https://arxiv.org/abs/1803.10122
- PlaNet https://arxiv.org/abs/1811.04551
- Dreamer: https://ai.googleblog.com/2020/03/introducing-dreamer-scalable.html
- Object Oriented Learning: https://oolworkshop.github.io/
- From Skills to Symbols: Learning Symbolic Representations for Abstract High-Level Planning
- Dyna-Q: Dyna, an integrated architecture for learning, planning, and reacting. Chapter 9, Reinforcement Learning (Sutton and Barto)
- When to Trust Your Model: Model-Based Policy Optimization.: https://arxiv.org/abs/1906.08253